دانلود انواع مقاله
(پروژه، مقاله، پایان نامه، گزارش کارآموزی، سوالات استخدامی، طرح توجیهی و...)دانلود انواع مقاله
(پروژه، مقاله، پایان نامه، گزارش کارآموزی، سوالات استخدامی، طرح توجیهی و...)پروژه کوره القایی در فرکانس شبکه…
مقدمه:
صنعت متالوژی یا به عبارت دیگر صنعت ریخته گری وعلم یکی ازکهن ترین علو وصنایعی است که بشربه آن پرداخته است ودرآن پیشرفت کرده است. مهمترین مساله ای که دراین زمینه ازدیرباز وجود داشته وذهن بشر به آن معطوف بوده است مساله ذوب کردن مواد مختلف می باشد که برای ساخت ابزارآلات ووسایل مختلف مجبور به انجام آن بوده است. شاید به جرات بتوان ادعا کرد که استفاده ازنیروی الکتریسته برای ذوب کردن مواد، نقطه عطف صنعت متالوژی بوده است. دراین زمینه کوره های القائی، پرکاربردترین کوره ها در این زمینه بوده اند که با استفاده ازایجاد گرما توسط نیروی مغناطیسی کارمی کنند و مزایای پرشماری نسبت به سایر روشها ذوب دارند که درفصل دوم بدان می پردازیم.
فهرست مطالب
* خلاصه
* فصل اول – مقدمه
* ۱-۱- تاریخچه مختصری ازگرمایش القائی
* ۱-۲- طبقه بندی کوره های القائی ازنظرفرکانس
* ۱-۳- کاربرد گرمایش القائی درصنعت
* فصل دوم – اصول گرمایش القائی ومزایای آن نسبت به سایرروشها
* ۲-۱- مقدمه
* ۲-۲- اساس گرمایش القائی
* ۲-۳- اساس کارکوه القائی
* ۲-۴- توزیع جریان گردابی دریک میله توپر
* ۲-۵- مزایای گرمایش القائی نسبت به سایرروش ها گرمادهی
* فصل سوم – انواع کوره های القائی ذوب (فرکانس شبکه)
* ۳-۱- مقدمه
* ۳-۲- کوره های القائی بدون هسته
* ۳-۳ – کوره القائی کانالی
* ۳-۳-۱- کوره القائی کانالی خودریز
* فصل چهارم - تجهیزات جانبی ونقش آنها درعملکرد کوره های القائی
* ۴-۱- مقدمه
* ۴-۲- سیستم های حفاظتی
* ۴-۲-۱- وسیله ایمنی اتصال زمین
* ۴-۲-۲- رله فشاری
* ۴-۲-۳ – رله های ولتاژ زیاد وجریان زیاد
* ۴-۲-۴ – رله های حرارت زیاد
* ۴-۲-۵ – تخلیه بار خازن ها
* ۴-۳- سیستم خنک کنندگی
* ۴-۴- مواد دیرگذار
* ۴-۴-۱آسترکشی کوره
* ۴-۵ –سیستم تخلیه مذاب
* ۴-۶ – بانک خازن
* ۴-۶-۱ حفاظت خازن ها
* ۴-۷ – سیم پیچ کوره های القائی
* ۴-۷-۱ ضریب کیفیت سیم پیچ کوره
* ۴-۸ –ترانسفورماتور
* ۴-۹- سلف کوره های القائی
* ۴-۱۰ – طرح کلی یک کوره القائی
* ۴-۱۱- مسئله « پل » درکوره های القائی
* ۴-۱۲- خطرقراضه های مرطوب
* فصل پنجم – اصول جبران سازی بارومتعادل کردن آن
* ۵-۱- مقدمه
* ۵-۲- تصحیح ضریب قدرت وجبران سازی
* ۵-۳-متعادل کردن بار
* ۵-۳-۱ مدارمتعادل کننده ایده آل
* فصل ششم – انتخاب مشخصات اصلی کوره های القائی ذوب
* ۶-۱- مقدمه
* ۶-۲- انتخاب مشخصات ظاهری کوره
* ۶-۳- انتخاب فرکانس مناسب
* ۶-۴- انتخاب توان مورد نیاز
* ۶-۵- انتخاب ظرفیت کوره
* فصل هفتم
* نتیجه گیری وپیشنهاد
* منابع ومراجع

پروژه عملکرد سیستمهای تحریک استاتیک در ژنراتورهای سنکرون…
سیستم های تحریک استاتیک راه حل ارزشمند غلبه بر مشکلات سیستم های فرسوده و قدیمی در زمینه تحریک ژنراتور می باشند. مزایای ناشی از بهبود و توسعه سیستم های تحریک قدیمی به تحریک استاتیک فراتر از صرفه جوییهای مربوط به نگهداری سیستم است.
مشخصات مطلوبی در راه اندازی موتورها توسط سیستم های تحریک ایجاد می گردد. بعلاوه راندمان بالاتری را نسبت به تحریک کننده های گردان داشته و توان کمتری را مصرف می کنند. در واقع راندمان بالا یعنی هزینه عملیات کمتر و بازگشت سرمایه گذاری اولیه سریعتر است.
یک سیستم تحریک استاتیک به لحظ عملکرد شبیه تنظیم کننده اتوماتیک ولتاژ میدان رفتار می کند بطوریکه اگر ولتاژ ژنراتور کاهش داشته باشد جریان میدان را افزایش می دهد و بر عکس اگر ولتاژ ژنراتور افزایش داشته باش جریان میدان را کاهش می دهد.
در واقع سیستم تحریک استاتیک توان میدان اصلی ژنراتور تأمین می کند در حالیکه تنظیم کننده ولتاژ، توان میدان تحریک کننده را برآورده می سازد. درسیستم تحریک استاتیک ۳ مؤلفه اصلی وجود دارند: قسمت کنترل، پل یکسوساز و ترانسفورماتور قدرت که در ترکیب باهم میدان ژنراتور را برای استیابی به ولتاژ خروجی مناسب، کنترل می کنند.
در ادامه سرفصل های این پروژه.
فصل ۱- عملکرد سیستم تحریک استاتیک
۱-۱- مقدمه
۱-۲- کنتاکتور قطع کننده میدانAC
۱-۳- ترانسفورماتور قدرت
۱-۴- راه اندازی اولیه ژنراتور
فصل ۲- پل یکسو ساز قدرت
۲-۱- مقدمه
۲-۲- سیستم سه تریستوره
۲-۳- سیستم شش تریستوره
فصل ۳- مشخصه سیستم تحریک استاتیک
۳-۱- پاسخ به افزایش پله ای ولتاژ
۳-۲- پاسخ به کاهش پله ای ولتاژ
۳-۳- تفاوت سیستم ۶ تریستوره و ۳ تریستوره
فصل ۴- حفاظت های پل یکسو ساز قدرت
۴-۱- مقدمه
۴-۲- حات های گذرای اتصال کوتاه
۴-۳- حالت های گذرای لغزش قطب
۴-۴- حالتهای گذرای کوتاه مدت
فصل ۵- کنترل ولتاژ
۵-۱- ترانسفور ماتورهای اندازه گیری
۵-۲- جبران سازی موازی
۵-۳- تنظیم کننده اتوماتیک ولتاژ
۵-۴- محدودساز کاهش فرکانس
فصل ۶- راه اندازی نرم ژنراتور
۶-۱- مقدمه
۶-۲- مدارهای کنترل آتش
فصل ۷- شرایط انتخاب تنظیم کننده تحریک استاتیک
۷-۱- انتخاب تحریک استاتیک
فصل ۸- رفتار سیستم تحریک استاتیک هنگام بروز خطا
۸-۱- مقدمه
۸-۲- راه اندازی موتورها توسط ژنراتور
فصل ۹- ولتاژ شفت
۹-۱- مقدمه
نتیجه گیری فرمت فایل ورد می باشد
پروژه سیستم کنترل گسترده پست فشار قوی…
چکیده
فصل اول – مقدمه
فصل دوم – طراحی و کارآیی SAS
1-2- طراحی و کارآیی SAS
2-2- مزایای کارآیی عملی سیستم
3-2- سیستم های مانیتورینگ و اتوماسیون
4-2- خصوصیات عمومی سیستم های SAS 5XX
فصل سوم – سیستم پیشرفته اتوماسیون پست SAS 570
1-3- سیستم پیشرفته اتوماسیون پست SAS 570
2-3- نصب سیستم
3-3- خصوصیات مشترک SAS
4-3- خصوصیات SAS 570
5-3- طراحی و عملکرد مشترک SAS
6-3- طراحی و عملکرد SAS 570
7-3- تجهیزات سیستم
8-3- تنظیمات سیستم
9-3- وظایف سیستم
10-3-وظایف ابتدایی مانیتورینگ سیستم
11-3- وظایف ابتدایی کنترل سیستم
12-3- نگاهی کلی به پست
13-3- وظایف ابتدایی مانیتورینگ (اختیاری)
14-3- وظایف ابتدایی کنترل (اختیاری)
15-3- خلاصه قابلیت های سیستم اتوماسیون پست
فصل چهارم – اجزاء سیستم اتوماسیون
1-4- کوپل کننده های ستاره ای (RER 111)
2-4- واحد گیرنده و فرستنده (RER 107)
3-4- GPS
4-4- نرم افزار کنترل سیستم اتوماسیون پست Micro Scada
5-4- فیبر نوری در سیستم حفاظت و کنترل پست های فشار قوی
6-4- رله REC 561 ترمینال کنترل حفاظت
7-4- رله REL 670 حفاظت دیستانس خط
8-4- رله RED 521 ترمینال حفاظت دیفرانسیل
9-4- رله RET 670 حفاظت ترانسفورماتور
10-4- رله REX 521 پشتیبان فیدر
11-4- سیستم REB 500 SYS حفاظت پست
12-4- رله RES 521 اندازه گیری زاویه
فصل پنجم – سیستم مانیتورینگ SMS 530
منابع و مآخذ
پیوست ها

پروژه بررسی عملکرد رله پیلوت در شبکه فوق توزیع…
مقدمه
در تاسیسات الکتریکی مانند شبکه انتقال انرژی، مولد ها و ترانسفورماتورها و اسباب و ادوات دیگر برقی در اثر نقصان عایق بندی و یا ضعف استقامت الکتریکی دینامیکی و مکانیکی در مقابل فشارهای ضربه ای پیش بینی نشده و همچنین در اثر ازدیاد بیش از حد مجاز درجه حرارت، خطاهایی پدید می آید که اغلب موجب قطع انرژی الکتریکی می گردد. این خطاها ممکن است بصورت اتصال کوتاه اتصال زمین پارگی و قطع شدگی هادی ها و خورده شدن و شکستن عایق ها و غیره ظاهر شود. شبکه برق باید طوری طرح ریزی شود که از یک پایداری و ثبات قابل قبول و تا حد امکان مطمئنی برخوردار باشد. امروزه قطع شدن برق برای مدت کوتاهی باعث مختل شدن زندگی فردی و قطع شدن برق کارخانه های صنعتی و مصرف کننده های بزرگ ٍ موسسه های علمی و پژوهشی به مدت نسبتا طولانی موجب زیانهای جبران ناپذیر می شود لذا قطع شدن و یا قطع کردن دستگاهها و تجهیزات الکتریکی معیوب از شبکه لازم است ولی کافی نیست. باید تدابیری بکار برده شود که برق مصرف کننده ای که در اثر بوجود آمدن عیب فنی از شبکه قطع شده است در کوتاه ترین مدت ممکنه مجدداٌ تامین گردد. وظیفه رله این است که در موقع پیش آمدن خطا در محلی از شبکه برق متوجه خطا شود ٍ آنرا دریابد و شدت آنرا بسنجد و دستگاههای خبری را آماده کند و یا در صورت لزوم خود راساٌ اقدام کند و سبب قطع مدار الکتریکی شود. در این نوشته سعی شده است رله های حفاظتی پیلوتی اساس کار آنها و همچنین طریقه ارسال اطلاعات در این رله ها مورد بررسی قرار گیرد. در شش فصل اول از آوردن عکس و مطلب در مورد رله های واقعی پرهیز شده است در فصل هشتم رله های مربوط به حفاظت پیلوتی پستهای اختصاصی مترومورد بررسی قرار گرفته است.
پروژه بررسی روش های راه اندازی موتورهای القایی و بهبود راه اندازی آن ها…
دسته: برق
حجم فایل: 3804 کیلوبایت
تعداد صفحه: 121
چکیده:
با توجه به این که موتورهای القایی دارای جریان راه اندازی زیادی هستند و میتوان آنها را به صورتهای مختلف راه اندازی کرد، پس میتوان برای موتورهای با قدرتهای مختلف یکی از روشهای مناسب راه اندازی برای آن موتور را انتخاب کرد، تا جریان کمتری در هنگام راه اندازی از شبکه کشیده شود و همچنین آسیب کمتری به آن موتور وارد شود. توانایی کنترلر طراحی شده در راهاندازی نرم و بهبود ضریب توان موتور بطور موفقیت آمیز در آزمایشگاه انجام گرفته است. بنابراین عوارض نامطلوب خراب شدن ولتاژ شبکه تغذیه دراثر راهاندازی موتور و همچنین اتلاف در بی باری و یا بارهای کم پیشگیری می شود.
فهرست مطالب:
مقدمه
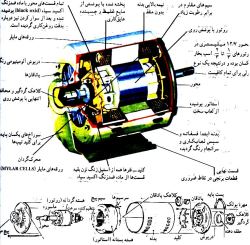
فصل اول: ساختمان موتورهای القایی
فصل دوم: مشخصات گشتاور- سرعت موتور القایی
گشتاور القایی از دیدگاه فیزیکی
یافتن معادله گشتاور- سرعت موتور القایی
توضیحاتی در مورد منحنی گشتاور- سرعت موتور القایی
گشتاور ماکزییم (برون کش) یک موتور القایی
تغییرات مشخصات گشتاور- سرعت موتور القایی
کنترل مشخصات موتور با طراحی روتور قفس سنجابی
طرحهای روتور ژرف- میله و دو قفسی
کلاسهای مختلف طرح موتور القایی
راهاندازی موتورهای القایی چند فاز
مدلهای راه انداز موتور القایی
فصل سوم: انواع روشهای راهاندازی موتورهای القایی
استفاده از مقاومتهای راهانداز در مسیر استاتور
ترانسفورماتورهای راهاندازی
راه اندازی ستاره - مثلث
راه اندازی موتورهای رتور سیم پیچی شده (راه اندازی رتوری)
راه اندازهای نرم
راه اندازی با ولتاژ متغییر و جریان محدود شده
قوانین مربوط به کنترل یک موتور آسنکرون قفس سنجابی
راه اندازی تریستوری
راه اندازی الکترونیکی
گشتاور قابل دسترسی
کنترل راهانداز نرم
شرایط راهاندازی و توقف نرم موتور
کلیات General
حفاظت گرمایی Thermal protection
ارتباط با دستگاه
خروجی های کنترلی
مشخصات دستگاه راهانداز
درجه حرارت، رطوبت، ارتعاش و شوک
ترکیب راه انداز - موتور
تنظیم پارامترهای راه انداز
تنظیم پتانسیومترها
تنظیم توقف Setting the stoping
توقف با شتاب کاهنده
ترمز موتور با تزریق جریان DC
تنظیم توقف موتور
دلایل احتمالی فالت حرارتی
اشکالات احتمالی
بهبود راه اندازی موتورهای القایی
سیستم کنترلر میکروپروسسوری
نتایج آزمایشگاهی
فصل چهار: روش راهاندازی موتورها القایی تکفاز
موتورهای یکفاز با خازن دائم کار
موتور یکفاز با راه انداز خازنی
موتور یکفاز دو خازنی
موتور یونیورسال
موتورقطب چاکدار
راه اندازی الکتروموتور سه فاز با جریان یکفاز
نتیجه گیری
مراجع و منابع
قیمت: 12,000 تومان